
La progettazione degli scafi plananti di Renato “Sonny” Levi
Progettazione degli scafi plananti
Negli anni Sessanta la progettazione degli scafi plananti ha cambiato più che in qualsia si altro periodo della sua storia.
Durante questo decennio si é verificata una notevole trasformazione sia in campo progettuale sia in campo costruttivo. Dapprima lentamente, e poi sempre più in fretta, si è iniziato a produrre quella che venne comunemente e un po’ approssimativamente, chiamata carena a “V profonda”.
Le competizioni delle imbarcazioni offshore furono, in un certo senso, le principali responsabili di questo fenomeno. Questo tipo di gara in mare aperto dimostra chiaramente la superiorità di queste carene, sottolineando in particolare le loro prestazioni con mare formato. L’espressione “carena a V profonda” diffuse in fretta il loro caratteristico morbido avanzamento nelle onde e nel volgere di una decina di anni, si verificò così una completa “conversione”.
Per quanto riguardava le imbarcazioni al di sopra dei 60 piedi, rimaneva però una certa “opposizione” al cambiamento.
Carena a V profonda
La maggiore obiezione alla carena a V profonda derivava dal suo teorico scarso rendimento in acque calme, nonostante gli ottimi risultati ottenuti con mare buono demolissero questa teoria.
Venivano chiamate a testimonianza alcune prove in vasca effettuate, prima della guerra, su modelli di carene di idrovolanti. Questi risultati avevano dimostrato, fra l’altro, che la resistenza aumentava con il diedro e pertanto la tradizionale configurazione con diedro variabile e sezioni di poppa piatte o quasi, era da considerarsi ancora la migliore. Probabilmente la più grande remora al non voler cambiare il tipo di carena per le barche più grandi, derivava dalle scarse prestazioni di alcuni cruiser da 70/80 piedi costruiti con carene a V profonda, in quegli anni. La maggior parte di questi motoryacht sembravano versioni maggiorate dei loro più piccoli equivalenti offshore da corsa. Ma era una procedura inesatta poiché erano stati dimenticati i principali fondamenti riguardanti l’effetto “scala”.
Un modo limpido di progettazione era stato abbandonato per seguire la moda dei diedri elevati su barche che non avevano la potenzialità di alta velocità o per ricavare i benefici di queste geometrie estreme.
Il fatto è che queste prime progettazioni da corsa erano per imbarcazioni di circa 30 piedi e per velocità comprese fra i 40-50 nodi. Il diedro di poppa effettivo che noi impiegavamo era fra i 20 e i 30 gradi e sperimentammo il miglior compromesso entro questa fascia. Fu chiaro dall’inizio che l’intensità dell’impatto dipendeva in gran parte dalla profondità del diedro nella zona di contatto e dalla velocità del contatto. L’assetto e la distribuzione dei pesi erano altri fattori di influenza.
Tutto ciò era ben conosciuto fin dall’epoca degli idrovolanti negli anni 30. L’ulteriore avanzamento progettuale e altri esperimenti in vasca, già citati, avevano offerto altre interessanti informazioni utili sull’assetto migliore per ottenere il rapporto ottimale fra spinta e resistenza alle varie angolazioni del diedro. Le imbarcazioni veloci a motore, comunque, differiscono in parecchi aspetti da questi idrovolanti e di conseguenza, ancora molti interrogativi cercavano risposta.
Poiché la prestazione é messa in relazione con la dimensione, per spiegarmi meglio userò la più comune formula per il coefficiente di velocità: V/Rad L
Secondo alcuni il metro di paragone più giusto è la larghezza al galleggiamento. Questo perché la lunghezza al galleggiamento varia con la velocità. Il fatto è che con l’impiego della carena planante a V tutte le dimensioni cambiano con il cambiare della velocità.
I principi di base e le leggi che governano la dinamica dei fluidi sono ben conosciuti. Numerosi eminenti ricercatori hanno studiato i vari aspetti di questa materia in profondità, esiste molta documentazione al riguardo e sono stati seguiti molti sistemi per arrivare alla valutazione delle diverse forme geometriche della carena. Uno sguardo a queste teorie dimostra la difficoltà fondamentale che si incontra nel valutare la “performance” di un disegno.
Da un punto di vista figurato, la planata avviene quando uno scafo si muove in modo sufficientemente veloce da “scalare” la sua onda di prua avanzando su un piano di pressione inclinato. Lo scafo è sostenuto in questa posizione di elevazione verticale, da un sostentamento dinamico prodotto dal relativamente forte spostamento in avanti. Questo alzamento dinamico è il risultato di una forza che è perpendicolare (cioè a 90°) con la carena e che proviene da una modificazione del momento di acqua deflessa. L’intensità di questa forza, dovuta all’alta pressione sotto la carena, varia con la velocità dello scafo, con l’incidenza e con la superficie effettiva interessata.
La distribuzione di questa pressione è legata alla velocità relativa ai diversi punti nella corrente.
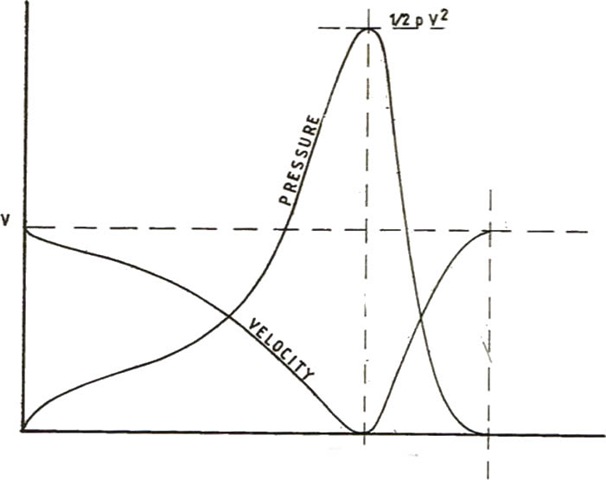 La figura 1a mostra la relazione fra pressione e velocità lungo il percorso di una superficie planante. In questo caso la distribuzione della pressione è quella di una carena piatta. Al punto di stagno, dove la velocità del fluido è 0, esiste la pressione massima che è ½ P V².
La figura 1a mostra la relazione fra pressione e velocità lungo il percorso di una superficie planante. In questo caso la distribuzione della pressione è quella di una carena piatta. Al punto di stagno, dove la velocità del fluido è 0, esiste la pressione massima che è ½ P V².
Mano a mano che la velocità aumenta, la pressione diminuisce e ritorna ai valori della pressione atmosferica all’uscita dello specchio, dove la velocità relativa è in effetti la velocità dello scafo.
Questa è la legge di Bernoulli.
L’effetto puro di questa distribuzione di pressione è di produrre una forza F che è inclinata di 90° rispetto al fondo come si vede nella figura 1 b. Questa reazione può essere risolta in una componente verticale L che tende a supportare la barca e una componente orizzontale D che tende a resistere a questo movimento di avanzamento.
L = F cos Theta e D = sen Theta
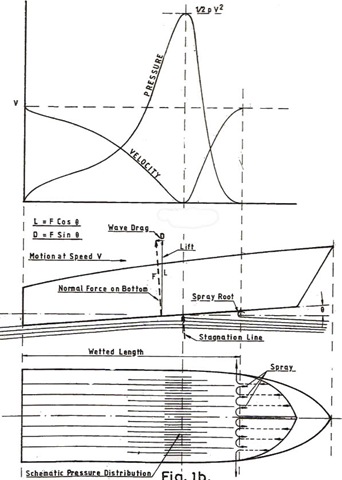
fig. 1 b e 2 b
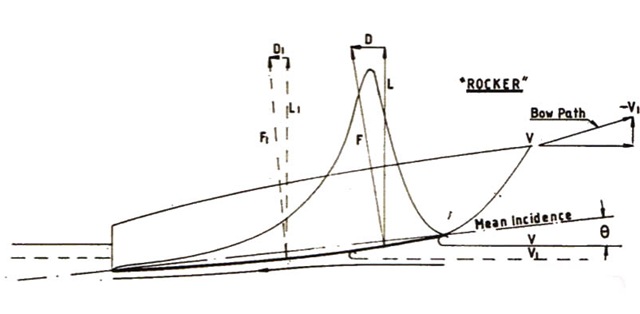
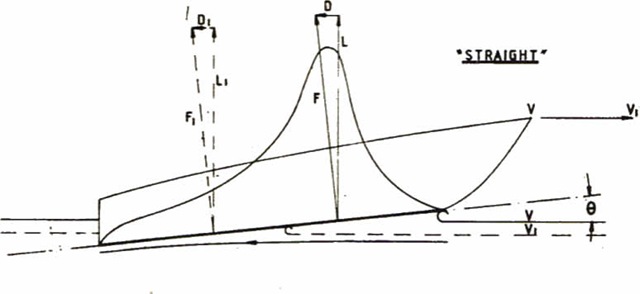
fig. 1a e 2c
E’ evidente che per valutare teoricamente la performance di un nuovo progetto è essenziale stabilire la posizione e l’entità di questa forza F.
Se esaminiamo l’effetto, deflettendo la corrente con un rocker (cioè carena convessa) — fig. 2 a — o con ‘hook” cioè carene concave — fig. 2 b — e poi con un fondo dritto — fig. 2 c — e ancora dando del V alla linea di stagno con diversi angoli al diedro, possiamo vedere che le variazioni sono infinite con un considerevole spostamento del centro di pressione.
La fig. 2 a mostra che, per una determinata inclinazione media, il rocker produce una elevata incidenza che risulta in un picco molto acuto di distribuzione della pressione (centro di pressione avanti) con una elevata componente di attrito.
Se il piano della superficie dell’acqua è abbassato, come accadrebbe se la velocità fosse aumentata, vediamo una progressiva riduzione di incidenza con una corrispondente perdita di alzamento dinamico. Così, per generare lo stesso alzamento di prima, l’incidenza deve essere aumentata, quindi la prua si alza e si arriva ad un “accorciamento” della superficie bagnata.
Questa situazione può andare a beneficio di scafi molto veloci se una forza di bilanciamento, come la spinta, crea uno stato di equilibrio. Se questa situazione è portata agli estremi, si ha una instabilità longitudinale (delfinamento).
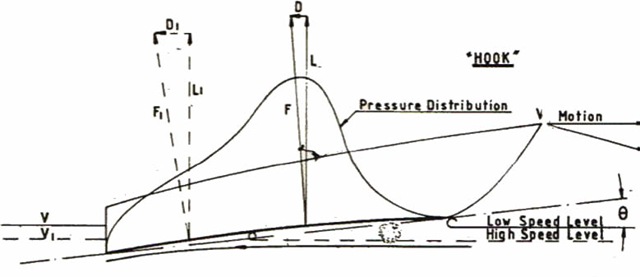 Viceversa un hook, fig. 2 b, produce un effetto opposto. Da notare che il diagramma di pressione è molto più curvo (centro di pressione arretrato).
Viceversa un hook, fig. 2 b, produce un effetto opposto. Da notare che il diagramma di pressione è molto più curvo (centro di pressione arretrato).
Questa situazione va a favore delle basse velocità avendo un ottimo alzamento dinamico con poco attrito.
Alle velocità più elevate la prua si abbassa: il risultato é un aumento della superficie bagnata, con attrito elevato, possibilità di instabilità laterale ed eventuale perdita del controllo direzionale.
La superficie planante dritta – fig. 2 c – è quella che permette la medesima relazione fra alzamento e attrito dinamico, relazione che è mantenuta per i diversi livelli di contatto con l’acqua alla stessa incidenza.
Ne segue che, se l’equilibrio é mantenuto ai vari livelli di contatto con il miglior rapporto possibile tra alzamento ed attrito, nel caso di una superficie piatta intorno ai 4 ½° di incidenza, si ottiene la condizione ideale.
Tale perfezione è improbabile, ma l’assenza di un momento di “beccheggio” della prua consente di raggiungere l’optimum per tutte le gamme di velocità della barca in questione.
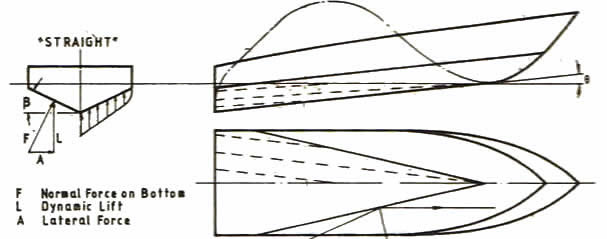 Per evitare un picco di pressione, come accadrebbe nel caso della fig. 1 b, si impiegano sezioni a V – fig. 3 a . Possiamo vedere che la linea di stagno diventa a forma di V con una curva di pressione integrata più piena e le linee di flusso sotto alla carena sono adesso diagonali. Questo, in effetti, vuol dire che la deflessione della corrente è minore rispetto all’incidenza della carena.
Per evitare un picco di pressione, come accadrebbe nel caso della fig. 1 b, si impiegano sezioni a V – fig. 3 a . Possiamo vedere che la linea di stagno diventa a forma di V con una curva di pressione integrata più piena e le linee di flusso sotto alla carena sono adesso diagonali. Questo, in effetti, vuol dire che la deflessione della corrente è minore rispetto all’incidenza della carena.
Guardando la pressione che si crea sotto alla sezione della carena e la forza che agisce a 90° sul fondo, l’alzamento L è forza cos ?.
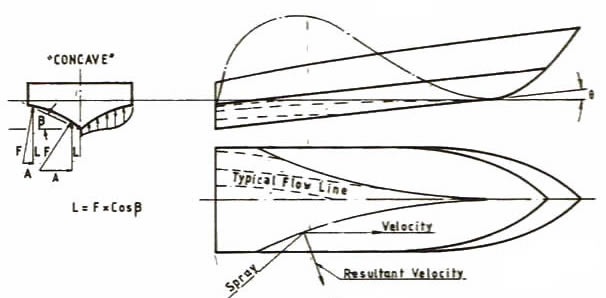
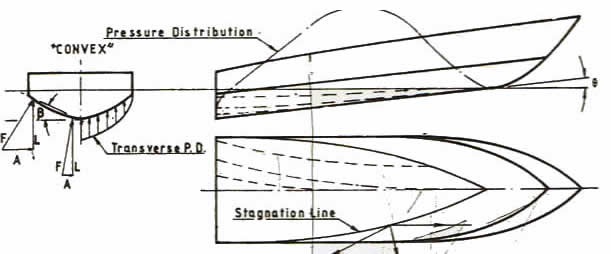
fig. 3 b e 3 c
Le figure 3 b – 3 c sono variazioni sulla fig. 3a e mostrano l’effetto che concavità e convessità nelle sezioni producono sulla linea di flusso e sulla distribuzione della pressione. In breve, la maggior differenza fra b e c può essere vista nella differenza dei diagrammi della pressione sotto le sezioni. Come la sezione in 3 b diventa più piatta verso i lati, produce progressivamente più spinta, e l’opposto è riscontrabile nelle sezioni della figura 3 c.
Questo dimostra che, quando la carena si solleva con l’aumento della velocità, 3 b perde rapidamente superficie di alto sostentamento dinamico nelle fasi iniziali. Ciò che rimane operativo in acqua è una inefficiente figura a cuneo concavo che ha poca portanza, alta superficie di attrito e “stretta” larghezza. Si deve anche notare che il basso diedro si ha allo spigolo, zona della carena soggetta a forti impatti.
La fig. 3 c non presenta, invece, questi inconvenienti: anche alle velocità più elevate questa sezione mostra buona riduzione di superficie bagnata con ottime qualità di alzamento dinamico e molta larghezza.
In più, dal punto di vista strutturale, una forma convessa ha ottima rigidità che permette strutture più leggere. I pattini longitudinali sono appendici ormai ben accettate sulle carene a V. La loro funzione è quella di incrementare il sostentamento dinamico e di ridurre la superficie bagnata. Poiché il flusso sotto ad una carena a V, come abbiamo visto già negli esempi della fig. 3 a -b-c, è diagonale, questi pattini longitudinali giocano il ruolo di controllori, raddrizzando e deflettendo il flusso in gran parte in basso.
Il bordo interno è il bordo di entrata e quindi costituisce la zona di alta pressione, mentre il bordo esterno, che è quello di uscita, permette una riduzione della superficie bagnata, dove c’è ventilazione (parte prodiera) — fig. 4 E’ possibile che, più a poppa, dove c’è una scarsità d’aria, ci sia una zona di bassa pressione lungo il bordo verticale. In questo caso è probabile che la corrente sia ulteriormente raddrizzata incrementando il sostentamento.
Questi pattini aumentano la stabilità dinamica sia direzionale che trasversale.
- Il primo caso è dovuto ad un aumento di pressione sulle parti verticali esposte alla spinta dell’acqua.
- Il secondo caso è dovuto ad un incremento di incidenza e di superficie della parte più immersa.
Un concetto diffuso e sbagliato sostiene che i pattini sono utili solo nella parte prodiera e che creano solo attrito a poppa. Questo non è esatto. Questa conclusione è probabilmente basata sull’esistenza di carene che navigano troppo piatte con pattini lungo tutto il fondo. In questi casi, togliendo una parte dei pattini a poppa, si riduceva il sostentamento e si aumentava la velocità.
Si poteva ottenere, molto probabilmente, lo stesso risultato, se non maggiore, lasciando lavorare i pattini lungo tutta la carena ma spostando il baricentro della barca più a poppa. Un progetto riuscito per uno scafo da mare aperto è quello che consente di navigare in modo efficiente entro tutta la gamma di velocità richieste. Dovrebbe essere in grado di mantenere alte velocità in acque mosse con il massimo comfort. Per una determinata misura di scafo il grado di comfort dipende dalla velocità: più questa è elevata, più è elevato il movimento.
Aumentando il diedro nella zona di impatto, si migliora questa situazione con la penalità di un incremento di attrito alle basse velocità. Il punto focale nella zona di alto impatto si muove progressivamente verso poppa mano a mano che la velocità aumenta fino al raggiungimento delle velocità molto elevate, V /Rad L > 8 sarà proprio all‘estrema poppa. Questo indica che il diedro in un progetto deve essere variato secondo la velocità.
Generalizzando io ho trovato un compromesso accettabile fra velocità e comfort secondo questi dati:
| V /Rad L | Diedro |
| = 3 | 16° |
| = 3,5 | 18° |
| = 4 | 20° |
| = 4,5 | 21° |
| = 5 | 22° |
| = 6 | 23° |
| = 7 | 24° |
| =>8 | 25°-30° |
Chiaramente ci sono eccezioni a questi valori. per esempio il diedro può essere ridotto su un runabaut veloce per ottenere più stabilità iniziale. Di contro, un cruiser o una barca da pattugliamento che deve navigare abitualmente in mari mossi potrebbero trarre vantaggio aumentando la V, e lo stesso vale anche per una imbarcazione da salvataggio.
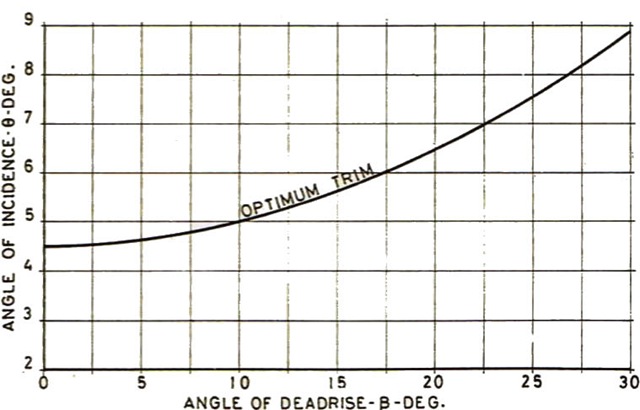
fig. 5
Per ogni determinato angolo di diedro c’è un angolo di incidenza ottimale (fig. 5).
Lo scopo é quello di avvicinarsi e mantenere questo angolo per tutta la gamma di velocità utilizzabili dallo scafo. In pratica questo angolo è superato spesso alle basse velocità mentre a quelle più elevate è troppo scarso. Nel primo caso il troppo accentuato angolo di attacco genera alta resistenza dell’onda di pressione. Nel secondo caso un assetto piatto causa un’alta resistenza della superficie bagnata. L’alto angolo di incidenza alle basse velocità è il risultato di un’insufficienza di superficie planante per supportare quel peso (alto carico di fondo) o del centro di gravità che si trova troppo a poppa, o ancora una combinazione di questi due fattori.

fig. 6 a
La fig. 6a illustra questa condizione.
 La fig. 6 b indica invece la situazione ideale che si dovrebbe realizzare alle basse velocità di crociera. C’è, inoltre, una componente di sostentamento idrostatico che può essere elevata a queste velocità e può essere considerata una forza di bilanciamento.
La fig. 6 b indica invece la situazione ideale che si dovrebbe realizzare alle basse velocità di crociera. C’è, inoltre, una componente di sostentamento idrostatico che può essere elevata a queste velocità e può essere considerata una forza di bilanciamento.
L’analogia che viene in mente è quella di un aeroplano durante la fase di decollo. Alle basse velocità una larga porzione del suo peso è supportata dal carrello, il sostentamento aerodinamico è relativamente basso. Mano a mano che la velocità aumenta, aumenta anche il sostentamento aerodinamico, riducendo il peso sulle ruote.
Tornando all’imbarcazione, alle velocità molto elevate, intorno al V / Rad L= 8, il sostentamento idrostatico è trascurabile.
(osservare la foto di G. Cinquanta in planata)

La tendenza del trim ad appiattirsi con l’incremento della velocità è dovuto alla necessità di aumentare la lunghezza bagnata per arrivare ad uno stadio di equilibrio (centro di gravità su centro di pressione). Collocando il centro di gravità più a poppa si migliorerebbe questa situazione. Una superficie bagnata più larga migliorerebbe la performance alle basse velocità su carene con un carico di fondo elevato. Questa superficie può essere aumentata sia allungando, sia allargando la carena.
Allungando la carena si otterrebbe un centro di pressione più a poppa che creerebbe di nuovo lo svantaggio già menzionato. Allargando la carena si otterrebbe un risultato migliore e per fortuna su una carena a V questo aumento di superficie non crea necessariamente attriti alle alte velocità. La miglior geometria che riguarda la riduzione delle superfici bagnate, dovute al sostentamento, è quella dove l’angolo di incidenza ottimale è mantenuto costante per tutte le velocità richieste.
È chiaro che per ottenere il meglio in entrambi i casi (cioè ad alte e a basse velocità), il centro di gravità deve essere il più arretrato possibile per le massime velocità e che ci sia una superficie adeguata a poppa, per evitare che la barca “si sieda” alle basse andature.
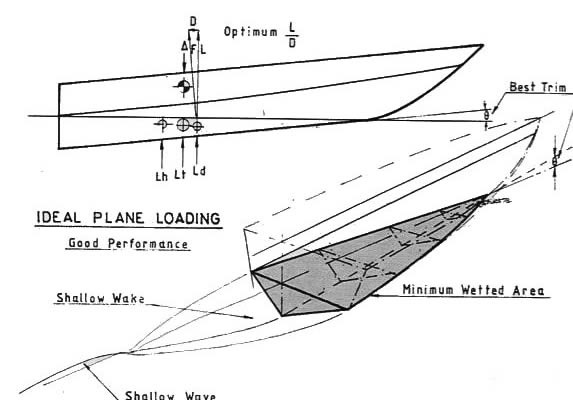
 Questi requisiti puntano a una geometria similare a quella della fig. 7 (a lato), dove poca o addirittura nessuna variazione di incidenza è necessaria per mantenere l’equilibrio.
Questi requisiti puntano a una geometria similare a quella della fig. 7 (a lato), dove poca o addirittura nessuna variazione di incidenza è necessaria per mantenere l’equilibrio.
Per arrivare ad una reale valutazione di performance di un nuovo progetto purché le velocità richieste siano entro i limiti consueti, si può raggiungere un notevole livello di precisione con modelli in vasca. Bisogna dire però che l’attendibilità di questi risultati dipende molto dall’esperienza di chi effettua materialmente la prova.
Nei casi di altissima velocità, dove la propulsione e l’effetto delle appendici giocano un ruolo molto importante, i risultati delle prove di questi modelli in scala possono essere di scarso valore.
D’altra parte, anche da queste prove possono venire indicazioni utili e si può intuire che un approccio puramente teorico a questo problema, necessitando di numerose supposizioni, rischia di portare a conclusioni poco attendibili.
Le mie considerazioni sulla progettazione si sono evolute maggiormente grazie alle esperienze effettuate su lavori precedenti, ma ho anche in numerose occasioni usato dati provenienti da prove in vasca.
Nonostante lo sviluppo di progetti basati su quelli già realizzati, sistema che sembra infallibile, talvolta mi sono imbattuto in qualche sorpresa e le incongruenze accadevano maggiormente quando cambiavano i sistemi di propulsione.
Guardando indietro, alcuni di questi risultati erano facili da spiegarsi in teoria, mentre altri non erano così ovvi. Certamente i tipi di trasmissione adottati hanno notevole importanza nella performance, indipendentemente dalla efficienza propulsiva. Questo non è dovuto solo alla variazione dell’attuale resistenza delle appendici, ma anche all’effetto che questo attrito ha sull’assetto dell’imbarcazione. L’attrito, come si sa, ha molta influenza alle alte velocità e le variazioni della direzione di spinta sono però altri importanti fattori da considerare.
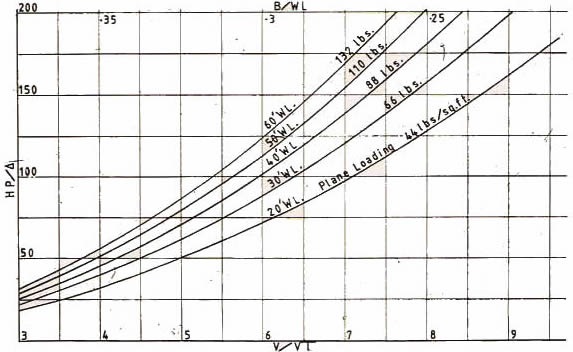
fig. 8
Il grafico della fig. 8 (qui a lato) mostra le velocità che si possono raggiungere su carene fra i 20 e i 60 piedi con diverse potenze. Il rapporto cavalli per tonnellata di dislocamento è indicato contro valori corrispondenti di coefficiente di velocità V /Rad L insieme al rapporto di larghezza – lunghezza consigliati. Viene anche indicato per ogni lunghezza al galleggiamento un medio carico di fondo.
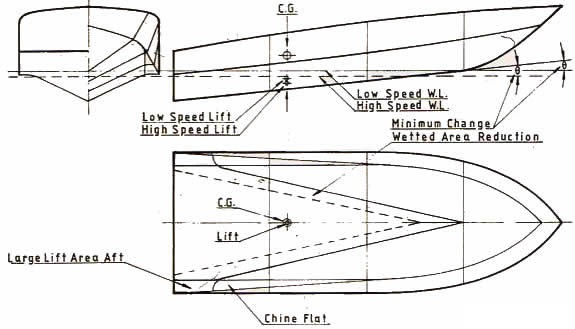
Queste curve sono basate su imbarcazioni con trasmissioni convenzionali bimotore selezionate tra i miei progetti e su mie carene, come si vede nella figura 9 (sotto).
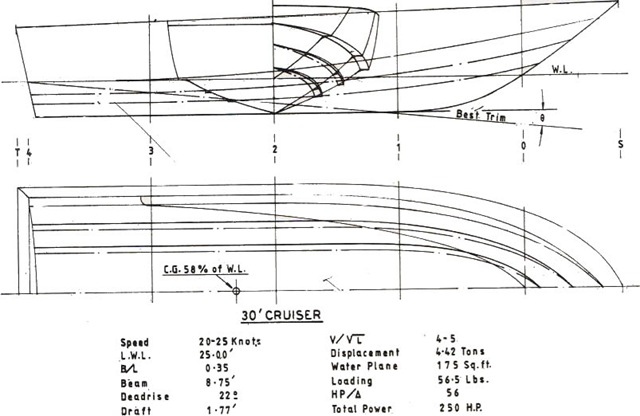 Il grafico rappresenta una serie di linee che io tendo a preferire e opportunamente modificare nelle loro proporzioni principali per le velocità richieste con risultati affidabili. Come si può vedere, la chiglia in profilo è parallela alla linea di galleggiamento con una curva dolce che accompagna lo slancio di prua. Lo spigolo a poppa è sulla linea di galleggiamento, per circa il 20% della lunghezza del galleggiamento stesso dallo specchio.
Il grafico rappresenta una serie di linee che io tendo a preferire e opportunamente modificare nelle loro proporzioni principali per le velocità richieste con risultati affidabili. Come si può vedere, la chiglia in profilo è parallela alla linea di galleggiamento con una curva dolce che accompagna lo slancio di prua. Lo spigolo a poppa è sulla linea di galleggiamento, per circa il 20% della lunghezza del galleggiamento stesso dallo specchio.
Questo consente alla carena di avere sezioni costanti in questa zona dello scafo. Lo spigolo è quindi alzato in una curva dolce fino ad incontrare la prua vicino alla cinta.
Visto in pianta il punto più largo dello spigolo è allo specchio. Questa larghezza massima, ottenuta dal rapporto larghezza-lunghezza, è mantenuta per circa il 50% della lunghezza al galleggiamento e gradualmente tirata verso il centro con una curva piena. Le sezioni sono a curva costante, la forma dello spigolo, sempre in pianta, è basata su un diedro intorno ai 40° rispetto alla curva di prua che è a circa il 10% dalla linea di galleggiamento. La superficie totale dei pattini a 0° di diedro, che include anche la zona piatta dello spigolo, sarà tra il 20 e il 25% della larghezza al galleggiamento a poppa.
Questa superficie è generalmente suddivisa in 2 o 3 pattini più il piatto dello spigolo per lato, per quanto talvolta siano stati applicati anche 4 pattini. Questi sono stati avviati in diverse maniere: dal seguire la linea al galleggiamento fino a mantenerli paralleli alla chiglia. Applicandolo nell’una o nell’altra di queste maniere si possono avere effetti negativi.
- La prima può causare una sorta di “imbardata” con scarso sostentamento.
- La seconda non sopprime gli spruzzi.
Avviare i pattini paralleli allo spigolo, tutto sommato, dà i risultati migliori. Mentre questi pattini sono indispensabili per migliorare le prestazioni di una carena a V, bisogna ammettere che induriscono la carena e quindi non bisogna eccedere.
Un altro importante punto è che un po’ di diedro dovrebbe essere incorporato in questi pattini nella parte prodiera dello scafo. Questo avrà l’effetto di convogliare lo spruzzo verso poppa, ridurre la durezza dell’impatto ed eliminare la possibilità di “inciampare” ad alta velocità. I coefficienti della superficie di galleggiamento e prismatico saranno intorno a 0,8 e il centro di galleggiamento longitudinale sarà collocato vicino al 60% della linea di galleggiamento da prua. Trimmare una carena così è essenziale.
Parlando in generale alle basse velocità V /Rad L fino a 4, il centro di gravità longitudinale dovrebbe essere intorno al 55% della linea di galleggiamento. Da un V /Rad L = 5 e 6 , il baricentro dovrebbe essere spostato più a poppa del 60% e addirittura al 70-75% per V /Rad L più grande di 10.
Il power trim (che consente di variare la spinta) sarà necessario per avere un equilibrio in modo che si possa mantenere un controllo con il centro di gravità longitudinale più a poppavia del 75%. Bisogna qui indicare che queste posizioni arretrate del centro di gravità daranno delle velocità ottimali, ma renderanno difficile la guida delle imbarcazioni e, in acque mosse, presenteranno dei pericoli. Per questo motivo sono essenziali dei flap montati sullo specchio: perché hanno un effetto dinamico correttivo, spostando il centro di pressione più a poppa e quindi tenendo giù la prua.
Anche il power trim può essere usato per cambiare l’assetto.
Per prevedere la performance di una barca simile a quella sopra descritta, la seguente formula darà risultati che dovrebbero essere precisi entro il 2-3%: V= L25 K Rad SHP/Delta
- Dove V è espresso in nodi
- L è la lunghezza in piedi
- Delta è il dislocamento in tonnellate
- K è una costante propulsiva che può variare da 1.4 a 1.8
Alcuni esempi di valore di K:
| K | 4 assi convenzionali sommersi | = 1.4 |
| K | 2 assi convenzionali sommersi | = 1.5 |
| K | 2 fuoribordo e 2 efb | = da 1.5 a 1.6 |
| K | 2 efb da corsa | = 1.8 |
| K | 2 eliche di superficie | = 1.8 |
Nei primi anni delle corse offshore, prima che fosse introdotto il power trim, le barche di prima fila erano progettate con rocker nell’ultimo 95% del fondo della carena, con il centro di gravità molto a poppa. Questo era fatto come tentativo per raggiungere un equilibrio con alti angoli di incidenza che davano i migliori risultati dal punto di vista della riduzione della superficie bagnata. Per affrontare condizioni di mare mosso queste barche erano dotate di casse di zavorra all’estrema prua.
Più tardi vennero applicati flap sullo specchio di poppa per migliorare l’andatura in queste condizioni. Benché questi primi scafi offshore con linee d’asse sommerse fossero relativamente lenti, con mare mosso andavano. È forse interessante notare che da circa 25 anni fa, le velocità massime si sono raddoppiate ma poco è stato migliorato nelle velocità con mare mosso. Certamente da allora non è stata fatta nessuna scoperta in merito per migliorare le carene.
Le condizioni che limitano le grandi velocità con mare agitato dipendono largamente da due fattori collegati, in un certo senso, fra loro.
- Il primo è l’intensità dell’impatto che avviene navigando contro le onde.
- Il secondo é la perdita del controllo direzionale che può avvenire con onde di poppa.
In entrambi i casi, l’intensità di questi due fattori dipende:
- dalla velocità dello scafo,
- dalle condizioni del mare rispetto alla misura della barca
- dalla direzione verso cui naviga rispetto alle onde.
Le condizioni peggiori si hanno quando si procede ad alta velocità con mare di prua ed onde profonde, volando dalla cresta all’incavo dell’onda stessa. Queste andature producono altissime accelerazioni verticali che possono provocare dei cedimenti strutturali o seri danni fisici all’equipaggio. Per evitare questi pericoli si dovrebbe cercare di navigare diagonalmente rispetto alle onde e variare la velocità a seconda delle necessità. Un assetto appruato, che può essere ottenuto con l’impiego dei flaps, accoppiato ad un generoso diedro nelle zone d’impatto, contribuiscono molto ad addolcire questo disagio.
Del resto, troppa V nelle sezioni prodiere può provocare uno sbilanciamento longitudinale. Questo comporterà una perdita di stabilità direzionale navigando con mare di poppa e onde alte. La barca acquista velocità scendendo dalla cresta e, nell’incavo, subisce una rapida decelerazione con la prua infilata nell’acqua dell’onda successiva. Una prua con molto diedro ha poco sostentamento dinamico o idrostatico ma offre una larga superficie laterale che sposta in avanti il centro di resistenza laterale – fig. 10 a – 10 b.
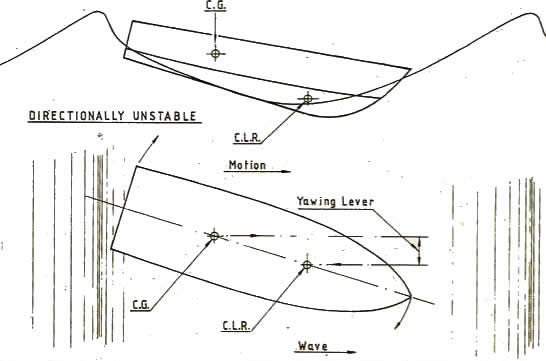
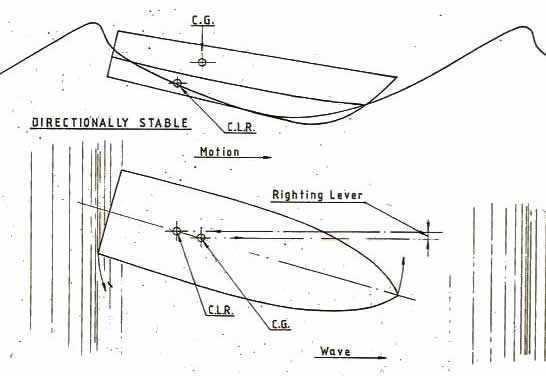
Questo fatto, accoppiato con la posizione arretrata del centro di gravità, produce un momento di sbandamento che può superare la forza di correzione dei timoni. La barca gira a destra e a sinistra e in condizioni estreme può effettuare un testa-coda con la possibilità di rovesciarsi. Il fenomeno dello “spin out” cui le barche da corsa talvolta incorrono può essere così spiegato.
Il passato più recente ha dimostrato un costante progresso nella performance delle barche plananti. I progetti sono migliorati, ma soprattutto ci sono motori più potenti con trasmissioni più efficienti e nuovi materiali. L’introduzione di nuovi turbo diesel con rapporti di peso/potenza più vicini ai motori a benzina, ha reso possibile ottenere elevate velocità e nello stesso tempo riduzione nei costi di gestione. A parte l’ovvio vantaggio nel prezzo, l’economia nel consumo dei diesel (circa 1/3 meno di quelli a benzina) offre un ulteriore “bonus” nella riduzione del peso del carburante, di grande beneficio nei lunghi tragitti.
Le innovazioni nelle trasmissioni hanno molto contribuito ad aumentare la velocità. Nella categoria dei gruppi efb molta attenzione è stata dedicata all’avviamento delle parti sommerse per ridurre l’attrito delle appendici e incrementare l’efficienza con il “power trim” che ha permesso di variare la spinta permettendo di “trimmare” gli scafi in modo migliore.
Come si sa, esiste anche la possibilità di applicare trasmissioni con eliche contro rotanti con ottimi risultati. Poiché le trasmissioni con eliche di superficie sono comparse circa 20 anni fa, è solo negli ultimi anni che hanno cominciato a conquistare il grande pubblico. L’enorme riduzione, pressoché l’eliminazione degli attriti delle appendici che questo sistema offre, è il “rimedio” per le alte velocità.
Per citare un esempio: un fast commuter da 31’ al galleggiamento, motorizzato con due motori per un totale di 750 HP e con due eliche sommerse, ha toccato alle prove la velocità massima di circa 42 nodi. Una barca simile, con stesso peso e stessi motori, ma con eliche di superficie, ha toccato i 50 nodi, il che rappresenta un incremento del 20% di velocità dovuto quasi interamente alla diminuzione dell’attrito delle appendici.

O, da un altro punto di vista, ulteriori 350 cavalli (il 47% in più della potenza originale) sarebbero stati necessari per arrivare ai 50 nodi con il sistema convenzionale. È facile capire che, alle velocità più elevate, l’attrito delle appendici può superare la metà della resistenza totale. E anche interessante segnalare che ogni linea d’asse, in questo caso, assorbiva circa 175 cavalli.
Le strutture costituiscono un altro elemento che può permettere un miglioramento del rapporto dipeso. Probabilmente le strutture più convenienti per le barche veloci possono essere quelle del tipo monoscocca o semi-mono-scocca. La ragione deriva dal fatto che le pressioni sotto al fondo di questi scafi sono estremamente alte. La resistenza alla deformazione al carico di pannello è dunque uno dei fattori determinanti. Per queste applicazioni, i pannelli spessi e leggeri sono i più indicati. Costruzioni in lamellare di legno con nuclei a bassa densità danno ottimi risultati purché garantiscano scocche leggere e rigide.
Anche sofisticate strutture in metallo sono state usate per superare le deformazioni prodotte dall’effetto “egg box”. Inoltre molti e differenti tipi di vetroresina rinforzata hanno avuto successo anche se il loro peso è paragonabile a quello del lamellare di legno. Oggi con le fibre di carbonio e il kevlar, purché ben lavorati attorno a sandwich di schiuma di differenti spessori, si possono produrre strutture con un 30% di peso in meno.
Nel futuro della progettazione di monocarene a V, per quanto riguarda la velocità pura, sembra che i limiti non siano lontani. La stretta superficie di planata su cui finiscono per viaggiare queste barche, crea una stabilità laterale piuttosto precaria.
Un altro fattore, forse ancor più importante, è quello di riuscire a mantenere la stabilità longitudinale su una linea di galleggiamento molto corta, con la spinta come fattore di bilanciamento. Una monocarena con redan potrebbe superare questo problema con un incremento di superficie bagnata ma senza eliminare l’instabilità laterale.
Alcuni risultati recenti delle gare offshore, quando il tempo lo ha permesso, hanno dimostrato la netta superiorità dei catamarani, o scafi a tunnel come talvolta vengono definiti, che debbono i loro successi in larga parte al sostentamento aerodinamico. In mare formato le imbarcazioni veloci passano una buona parte del loro tempo volando e i catamarani non fanno eccezione. Nel rientro, le forze che agiscono sul fondo di un monocarena a V profonda possono essere estremamente alte. In un catamarano vi sono molte superfici piatte, o quasi piatte, fra le due carene che risultano esposte alle onde sopravvenienti con altezza relativamente bassa.
Non è sorprendente, in queste circostanze, che queste aree a poppa sotto il tunnel siano soggette a intensi sforzi che possono talvolta far cedere le strutture. Bisogna anche dire che la geometria di un catamarano non è la più semplice per quanto concerne le strutture di costruzione per tenere insieme le due scocche nella zona di alto stress a poppa. Per questi motivi spesso questi tipi di scafi, nella loro attuale geometria, hanno dato risultati negativi in acque mosse.
Circa 15 anni or sono ho disegnato una barca da corsa offshore per la classe 2 che faceva uso del sostentamento aerodinamico ma, nello stesso tempo, tentava di superare i problemi derivanti dal mare agitato tipici dei pluriscafi. Ho adottato una geometria a triciclo rovesciato vedi Arcidiavolo.
Si trattava di una piattaforma alare rettangolare con due carene a prua e una scocca centrale a poppa che ospitava i due componenti l’equipaggio e il singolo motore da 500 cavalli. Le ragioni per questo inconsueto disegno erano semplici: il sostentamento aerodinamico veniva assicurato dal tunnel a Y e l’area di alto sforzo a poppa veniva eliminata dalla gondola centrale.
La barca era spinta da una sola elica di superficie e governata da una pala di timone profonda e con sezione a cuneo.

Arcidiavolo II
Tecnicamente il progetto è stato un successo dimostrandosi superiore alle monocarene di potenza simile, sia in acque calme che mosse. Era più lento dei catamarani in acque calme, il che era previsto essendo il lift aerodinamico inferiore per l’ostruzione del tunnel data dalla gondola centrale di poppa. Questa barca ha stabilito il record mondiale della sua classe con la velocità di 125.44 km/h. (E, forse, è interessante segnalare che il record precedente apparteneva ad un monocarena e che fu un catamarano a stabilire quello successivo). Sfortunatamente una lunga serie di avarie meccaniche ha disturbato la carriera agonistica di questa barca da corsa, al punto che ha vinto solo l’unica gara che è riuscita a completare.
Guardando all’immediato futuro. mi sembra che una barca che raccolga i principi sopra descritti, possa offrire molti vantaggi degni di nota rispetto agli scafi esistenti per l’alta velocità in mare aperto.
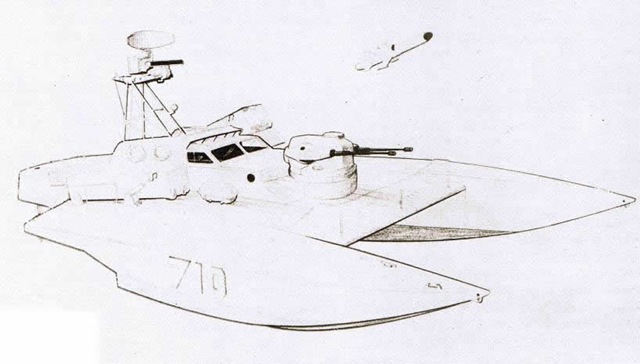
Il disegno di una ipotetica versione militare da 80 (25 metri), illustra il tipo di imbarcazione a cui mi riferisco.
Capitolo “Appendice tecnica A” estratto dal libro “Milestones in My Designs” di Renato “Sonny” Levi – editrice Kaos Service (MI) 1992 – e pubblicato per g.c. dell’autore





















Gentile Genni Palazzo.
In riferimento alla Sua gentile richiesta informazioni per una imbarcazione progettata dall’ing. Renato Sonny Levi, può chiamare lo scrivente Giacomo Vitale al 380 90 15 772.
La ringraziamo per averci contattato!
Giacomo Vitale
Altomareblu
Potrei ricevere un telefono per chiedere a qualcuno notizie su uno scafo di Sonny Levi???
Per valutare quanti pattini inserire,
così come le loro dimensioni, è necessario capire a cosa servono, quali sono gli effetti positivi e negativi che possono avere ed alla fine fare il solito bilancio.
Sarebbe quindi necessaria una lunga trattazione che le risparmio perchè sicuramente è già parte del suo bagaglio culturale e scentifico di laureanda di ingegneria navale (gli elementi di tale trattazione sono comunque già contenuti nell’estratto del libro di Sonny Levi riportato in questa pagina WEB con il titolo “La progettazione degli scafi Plananti”, ed ampliati nell’articolo di Antonio Soccol in La lunghezza dei pattini nelle carene a V profonda).
A valle di tale trattazione sorgerebbe inevitabile la seguente domanda: quali caratteristiche deve avere la mia barca? Deve essere più performante (maggiore superficie di pattini per generare più portanza), oppure essere manovrabile anche ad alte velocità (limitare le pareti verticali dei pattini e, di conseguenza, la larghezza dei pattini stessi)?
Sonny Levi aveva trovato che un buon compromesso fosse una larghezza complessiva dei pattini compresa tra il 20% ed il 25% della larghezza dello spigolo a poppa, altri avevano indicato il 20%.
Lascio a Lei la conclusione.
Antonio Soccol
Grazie per i chiarimenti sig. Soccol!
Spero di non approfittare della sua disponibilità chiedendole un’ulteriore conferma riguardo la progettazione dei pattini della carena oggetto della mia tesi di laurea.
Si tratta di una carena di circa 15 m (Bchine = 3.83 m) con un deadrise a poppa di 22°, con sezioni trasversali di forma convessa, ispirata alle carene delta di Levi, evitando di troncare la ruota di prua.
Inizialmente ho modellato la carena con uno spigolo di circa 9 cm, osservando che alcune carene delta di Levi presentavano uno spigolo di larghezza di gran lunga inferiore rispetto a quella dei pattini.
In seguito per cercare di aumentare la superficie portante della carena (ridotta dal pronunciato diedro scelto per favorire la tenuta a mare alle alte velocità) e al contempo di ridurre la superficie bagnata ho rimodellato la superficie della carena inserendo due ordini di pattini (4 pattini in totale), lasciando invariata la larghezza dello spigolo.
Non riuscendo ad interpretare quello che avevo letto dal vostro sito, ho fatto riferimento ai miei studi,considerando che al massimo la somma totale delle larghezze dei pattini e degli spigoli dovesse essere pari al 20% della Bchine (77 cm circa in totale).
Ho inserito quindi un primo ordine di pattini (2 pattini) , ciascuno di larghezza 10 cm, all’altezza di 1/3 del fondo a partire dalla chiglia ed un secondo ordine di pattini (2 pattini), ciascuno di larghezza 9 cm, all’altezza di 2/3 del fondo.
Ho preferito incrementare la larghezza del primo ordine di pattini (10 cm) rispetto a quella dello spigolo (9 cm) essendo quelli che dovrebbero lavorare di più data la loro immersione e per “prolungare” l’effetto portante dato dalla forma convessa della sezione del fondo; ho invece uguagliato la larghezza del secondo ordine di pattini a quella dello spigolo per evitare di eccedere.
(10 + 9 + 9) *2 = 56 cm < 77 cm
Leggendo la sua risposta sul sito mi è sorto il dubbio di aver sbagliato e volevo qualche dritta in merito da chi sicuramente ne sa più di me.
Mi scusi per la lunghezza del post e per il disturbo.
Grazie mille anche al sig. Vitale.
P.s. Ho esteso entrambi gli ordini di pattini fino allo specchio di poppa!
Cordiali Saluti.
Marie
Direi che si tratta semplicemente di un’imprecisione. Infatti, come giustamente osserva la lettrice, non è possibile confrontare tra loro due grandezze non omogenee, in questo caso una superfichie [m^2] con una larghezza [m].
La frase va quindi riscritta nel modo seguente: “la larghezza totale dei pattini dovrebbe essere compresa tra il 20 e il 25% della larghezza al galleggiamento a poppa”. Ovviamente, come riportato anche precedentemente nel testo, tutte le misure sono relative alla poppa, dove si ha la massima larghezza sia dei pattini che dello scafo (questo sempre secondo Sonny Levi e riferito alle imbarcazioni da lui disegnate).
E tutto viene confermato se facciamo due conti. Ipotizziamo allora uno scafo largo a poppa 4 m al galleggiamento: il 25% di 4 m corrisponde ad 1 m di larghezza totale di superfici piane (spigolo + pattini). Quindi 1/2 metro per un solo lato di scafo per avere il quale sono sufficienti 3 pattini da 11 cm ed una zona piatta dello spigolo di 17 cm, sempre di larghezza, ovviamente!
A.S.
Gentilissima Marie,
Le chiediamo un attimo di pazienza per rispondere al Suo interessante quesito. Appena riceveremo la risposta sarà nostra cura inviarle una mail di avviso.
Grazie per averci scritto e per la sua pazienza.
Cordiali saluti,
Giacomo Vitale
Sono una studentessa laureanda in Ingegneria navale ed avevo bisogno di un chiarimento riguardo l’articolo che ho appena letto.
Ho letto che la superficie totale dei pattini dovrebbe essere compresa tra il 20 e il 25% della larghezza al galleggiamento a poppa.
Possibile che debba confrontare una superficie (quella dei patini) [m^2] con una lunghezza (Bwl) [m] ?
Se potesse dirmi come interpretare tali indicazioni per la progettazione dei pattini gliene sarei grata!
Ps.Complimenti per il sito!
Saluti
Una vera lezione da Professore Universitario di ingegneria Navale, non c’è che dire…
Spettacolare questo articolo.. me lo salvo e me lo stampo!
Saluti
Caro Alessandro,
abbiamo provveduto ad inoltrare a Renato “Sonny” Levi i tuoi complimenti e ti ringrazia.
Studi ingegneria navale? Congratulazioni. E’ impegno difficile ma che può dare molte soddisfazioni specie alla luce delle straordinarie “novità” che bisognerà quanto prima garantire a tutta la navigazione alla luce della drammatica crisi petrolifera e della ancor più tremenda situazione a proposito delle emissioni inquinanti.
L’umanità non può fare a meno del trasporto via mare (né i diportisti rinunceranno al loro “amore”): c’è dunque un sacco di lavoro da fare e i giovani “devono” farlo!
Auguri vivissimi e, se il nostro blog ti può essere di aiuto o di stimolo, beh… noi siamo qui.
Ciao,
Antonio Soccol
Mi presento,
il mio nome è Alessandro e sono uno studente di ingegneria navale appassionato del naviglio a sostentamento idrodinamico, non potevo non fermarmi in questo post e fargli i miei piu sinceri complimenti per aver dato una svolta alla nautica italiana degli anni 70, mio nonno maestro d’ascia mi ha guidato nei miei primi anni di studi relativi alle imbarcazioni plananti e ho potuto constatare che il merito per l’adozione della V profonda lo si deve alle sue imbarcazioni dalle ottime perfomance.
Distinti Saluti,
Alessandro