
Gabbiano o Delfino? di Franco Harrauer
Studi ed esperimenti per ottenere più alte velocità sopra e sotto la superficie dell’acqua
Sforzi tecnologici enormi, ma è la Natura a dominare sempre sugli elementi.
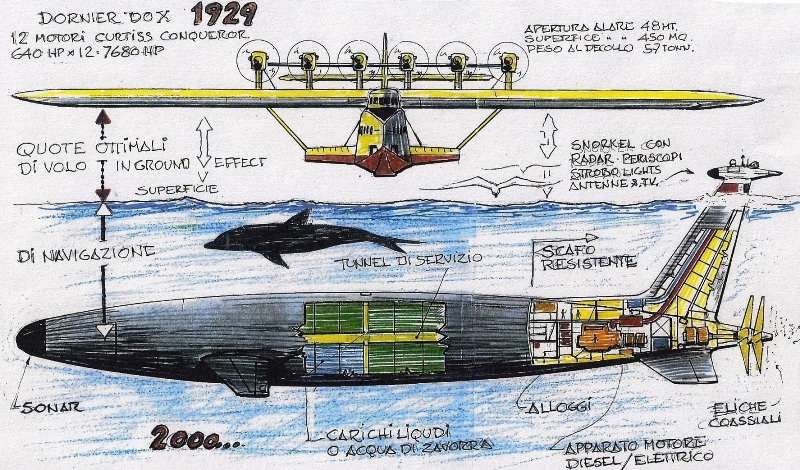
Dornier Dox (1929) a sei motori spingenti volo in effetto suolo. Sotto: una ipotesi di moderno sottomarino da trasporto
Durante una non lontana estate, mentre a bordo di un cruiser attraversavo l’Adriatico, ebbi modo di osservare il procedere alla mia stessa velocità di due creature familiari che vanno per mare.
Verso sera il mare era calmissimo, alla mia sinistra un gabbiano sfiorava la superficie marina con le ali tese e immobili a pochi centimetri dall’acqua, innalzandosi e abbassandosi in planata lungo il profilo delle basse onde.
Alla mia destra, a meno di un metro sotto la superficie dell’acqua cristallina, quasi sotto la prora della barca, filava un delfino senza alcun movimento o sforzo apparente, salvo qualche raro moto delle pinne pettorali per correggere la direzione della sua corsa.
Un gabbiano ed un delfino viaggiano a 25 nodi senza sforzo sopra e sotto l’acqua
La mia velocità di crociera era di circa 25 nodi con quasi mille cavalli scatenati per sconvolgere la superficie del mare con una lunghissima scia, mentre le due creature rispettivamente sopra e sotto la superficie marina nemmeno segnavano.
Quando per ragioni professionali devo affrontare il problema della velocità nella progettazione di uno scafo mi viene in mente lo spettacolo di quella sera in Adriatico e mi vien fatto di pensare che l’uomo ha inventato e impiega mezzi innaturali per solcare a fatica la superficie del mare, mentre la natura suggerisce da sempre una precisa scelta: navigare sott’acqua come un cetaceo, oppure planare sopra di essa come un gabbiano.

Antesignana degli SWATH
motosilurante VS 5 della Kriegs Marine nazista rimase un prototipo per l’eccessivo sbandamento laterale
Nella ricerca della velocità in mare io credo che non dovremo avere remore a considerare e studiare nuove forme e soluzioni uscendo dai campi “convenzionali e soprattutto pensando in modo diverso. Il grafico del rapporto velocità/potenza per uno scafo in dislocamento (immerso e sostenuto dal liquido che lo circonda) ha un andamento a parabola cubica.
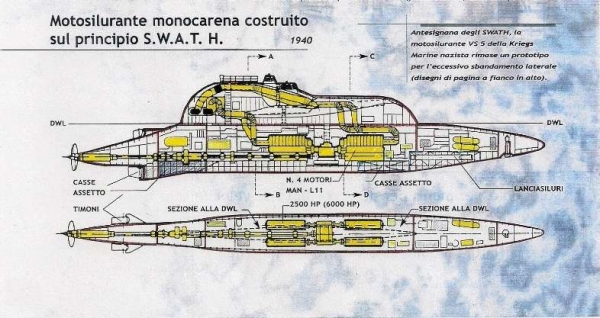
Motosilurante monocarena S.W.A.T.H.
Ogni incremento di velocità viene ottenuto con una potenza proporzionale al suo cubo. Questo scafo, se non ha limiti dimensionali, può essere progettato in qualsiasi grandezza e quindi con un rapporto lunghezza/larghezza ottimale, essendo parametri del rapporto gli unici elementi su cui lavorare per non pagare la penalizzazione dei corrispondenti incrementi cubici.
In tal modo si possono progettare scafi molto sottili con rapporto lunghezza/larghezza di 10: 1, ma con gravi limitazioni per la stabilità, le qualità evolutive ed i volumi utili. In ogni caso il rapido crescere della resistenza dell’onda con il crescere della velocità, pone dei limiti fisici e di convenienza che ci permettono raramente di superare i quaranta nodi.
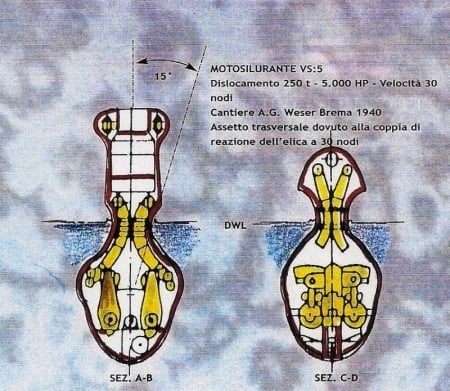
Sezioni motosilurante VS 5
Bisogna quindi battere altre strade se si vogliono ottenere alte velocità che non siano un traguardo da primato fine a sestesso. Una soluzione radicale potrebbe essere quella di svincolare la nave dall’acqua e di farla volare in “effetto superficie”. Ma come ho più volte sostenuto, credo che così si reinventerebbe l’aeroplano.
Altra soluzione totale è quella di staccarsi dalla superficie e navigare sotto di essa. Infatti, un sottomarino con forma idrodinamicamente corretta deve resistere al moto molto inferiori a quelle di una nave in superficie dato che ad una certa profondità la resistenza d’onda cessa di agire e rimangono solo le resistenze di attrito dovute alla superficie bagnata, quelle di appendice e quelle di scia.
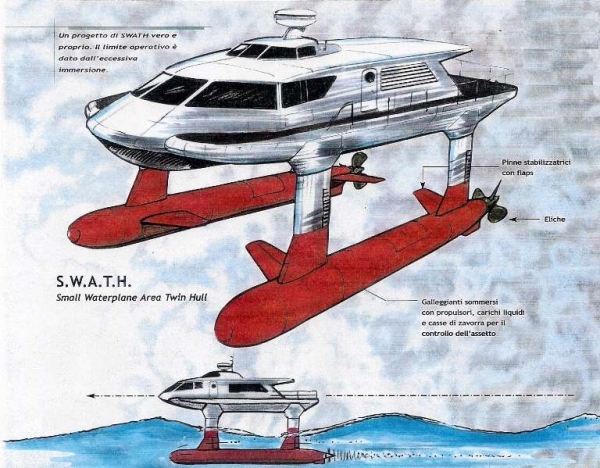
S.W.A.T.H. Small Waterplane Area Twin Hull
Nel 1987 l’Istituto di ricerche idrodinamiche Saint Petersburg Marine Design Bureau “Malakhit”, già autore dei progetti più avanzati della flotta sottomarina sovietica, commissionò al cantiere dell’Ammiragliato russo di San Pietroburgo un sottomarino laboratorio basato sulle forme di carena, idrodinamicamente molto curate, del sottomarino nucleare tipo “Alfa”.
Il battello a propulsione esclusivamente elettrica, denominato Beluga, fu attrezzato come laboratorio per lo studio delle resistenze d’onda, di scia, di appendice e di carena a varie profondità e ad alto numero di Reynolds. Venne anche sperimentato con successo il controllo del flusso laminare e dello strato limite mediante aspirazione o eiezione di una soluzione di polimeri (polietilene o plyacrylamide).
I moderni sottomarini nucleari raggiungono in immersione velocità dell’ordine dei 40 nodi e più con potenze nettamente inferiori a quelle impiegate per tali velocità dalle unità di superficie di dimensioni analoghe. Allo stato attuale dell’arte per lo sviluppo di unità veloci si possono seguire le seguenti vie:
A) scafi a dislocamento con alto coefficiente di finezza
B) poliscafi come i catamarani a scafi sommersi tipo SWATH
C) scafi che navigano attraverso la superficie dell’acqua con sostentamento in parte statico e in parte dinamico

Beluga (Projet 1710) – dis. Franco Harrauer
D) scafi a totale spinta idrodinamica come gli aliscafi ad ali secanti o ad ali totalmente immerse che necessitano di sensori di quota
E) scafi che navigano sopra la superficie dell’acqua su un cuscino d’aria con spinta statica come gli Hovercraft o S.E.S. (surface effect ship)
F) navi a sostentamento aerodinamico
Fatta questa lunga premessa non ci resta che esaminare nel dettaglio le diverse caratteristiche di questi tipi di imbarcazìoni. Data la complessità degli argomenti e delle illustrazioni lo faremo raggruppandoli in diverse puntate da cui il nostro lettore interessato potrà trarre una visione panoramica di quanto sia stato fatto e si continui a fare per ottenere velocità sempre maggiori (possibilmente con potenze sempre minori) dai mezzi navali o assimilabili.
Un sottomarino nucleare naviga immerso a 40 nodi
Scafi a dislocamento con alto coefficiente di finezza
Per questa categoria l’unica soluzione è quella di risolvere il problema della stabilità trasversale collegando l’uno all’altro due scafi con rapporto lunghezza/larghezza molto elevato. Con questa soluzione avremmo inventato il catamarano che per molti aspetti presenta dei limiti ben precisi. Alle velocità medio-basse la resistenza principale è sempre rappresentata dalla superficie bagnata che è ovviamente maggiore di quella di un monocarena.
Il catamarano è strutturalmente più complesso del monocarena, ma ha un comportamento marino migliore con una stabilità trasversale elevata e una ampiezza di rollio molto contenuta. L’evoluzione di questa imbarcazione è stata quella dello SWATH o catamarano semisommerso, dove la spinta di galleggiamento è fornita quasi per intero da due scafi fusiformi, di profilo molto avanzato, interamente immersi e collegati alla piattaforma emersa mediante elementi a pinna. L’unità è poco sensibile al moto ondoso essendo minime le variazioni di spinta. È quindi in grado di mantenere velocità sostenute anche con notevoli altezze d’onda.
Poliscafi a scafi immersi tipo SWATH
Lo SWATH ha un dislocamento unitario basso, ma è molto sensibile alle variazioni di peso che comportano mutamenti nell’immersione. Nel 1940 fu costruito in Germania un solo scafo sperimentale basato sul principio dello SWATH. Era uno scafo fusiforme di grande finezza idrodinamica contenente
quattro motori MAN di 2.500 cavalli ciascuno, i serbatoi, gli organi di propulsione e governo.
Lo scafo immerso era unito alla sovrastruttura emergente mediante una sottile pinna che alla linea di galleggiamento (DWL) aveva un eccezionale rapporto di finezza pari a 10 : 0,5. Il progetto però fu abbandonato dopo le prove eseguite con il prototipo nel golfo di Danzica perché già a velocità prossima ai 30 nodi lo scafo, per effetto del momento torcente dell’elica, assumeva uno sbandamento laterale di 15°.
La potenza installata di 5.000 cavalli avrebbe consentito una velocità teorica di 50 nodi. A prescindere dall’anomalo sbandamento laterale di 15°che poteva essere annullato con l’adozione di una coppia di eliche controrotanti, ritengo che il VS 5 (tale era la denominazione) non avrebbe potuto godere di una buona tenuta al mare in quanto la scarsa altezza della pinna, di circa 1,50 m poteva essere assorbita da quella dell’onda di un mare di media forza con notevole stress strutturale della pinna stessa.
Altro punto negativo per lo SWATH è la notevole immersione che peraltro potrebbe essere controllata mediante sistemi di casse di zavorra per mantenere i valori di dislocamento unitario.
Scafo in dislocamento
Quando la carena dell’unità è immersa nell’acqua. L’unità galleggia in funzione del peso dell’acqua spostata dal volume della sua carena che è uguale suo peso, secondo il noto principio di Archimede.
Effetto superficie
Quando una sezione d’ala in radente, vicino al terreno o all’acqua viene sostenuta non solo per effetto della sua velocità, ma anche per una corrente ascendente dovuta all’aria compressa tra la superficie ventrale dell’ala (intradosso) e la superficie del terreno o dell’acqua”.
Scafi sommersi tipo SWATH
Sono scafi muniti di galleggianti sommersi che, mediante piloni a pinna, sostengono la parte completamente emersa che non essendo più a contatto con l’acqua è svincolata da ogni attrito idrodinamico, ma non da quello aerodinamico e dagli effetti del movimento della superficie.
Ali secanti
Sono le superfici di sostentamento di cui sono muniti gli aliscafi. Con una predeterminata incidenza e a una data velocità generano portanza sull’acqua facendo emergere totalmente la carena che rimane così completamente svincolata dall’attrito dell’acqua.
Monocarena
È qualsiasi imbarcazione con scafo monolitico e quindi con unica carena
Catamarano
Appartiene alla categoria delle imbarcazioni a più scafi (poliscafi). Si dice catamarano quando gli scafi galleggianti sono due collegati superiormente da una struttura a ponte.
Momento torcente dell’elica
L’elica in rotazione per effetto del passo delle sue pale determina l’avanzamento della barca. Nello stesso tempo però genera una spinta perpendicolare al moto che si scarica sui supporti del suo asse, e quindi su tutto lo scafo, facendo ruotare tutto lo scafo attorno al suo asse longitudinale, secondo il proprio senso dì rotazione ingenerando così un’inclinazione proporzionale alla potenza del motore e al passo dell’elica.
Il presente articolo è stato scritto dall’arch. Franco Harrauer alla fine degli anni ’80 è qui pubblicato p.g.c. dell’autore





















Lascia un Commento
Vuoi partecipare alla discussione?Sentitevi liberi di contribuire!